Amateur(funk)computer AC1 - 40th anniversary
Projekt picoAC1
Motivation
In der Ausgabe 12/1983 der Zeitschrift Funkamateur startete eine Artikelreihe zum Selbstbau eines Computers,
die einiges Aufsehen erregte.
In dieser und zehn weiteren Ausgaben im Folgejahr wurden Konzept, Aufbau und Inbetriebnahme des Amateurfunkcomputers AC1 beschrieben.
Im Osten unseres Landes stellten Computer zu dieser Zeit die Ausnahme dar.
In der Industrie vereinzelt vorhanden, waren sie jedoch als Privatperson ohne Beziehungen nicht beschaffbar.
Allerdings tat sich einiges in der Bauteilproduktion. Die Z80-Reihe von Zilog wurde geklont und war im Handel erhältlich.
Auch die notwendige Peripherie war beschaffbar.
Auf diese Bedingungen war das AC1-Projekt ausgelegt.
Unter Federführung von Frank (heute DL7UFH) wurde ein Konzept erstellt,
eine Platine entworfen und ein Betriebssystem zur Verfügung gestellt.
Auf Grund der Marktlage waren einige Kompromisse in der Hardware-Ausstattung erforderlich.
Von den Platinen wurden schätzungsweise 6000 - 10000 Stück produziert,
sodass man davon ausgehen kann, dass einige tausend Exemplare zum Laufen gebracht wurden.
Wer damals dabei war, wird sich an den stolzen Moment erinnern, als zum ersten Mal der Cursor blinkte.
In den folgenden Jahren wurde die Hardware erweitert und Software geschrieben.
Viele weitere Artikel erschienen dazu im Funkamateur.
Zahlreiche Treffen und Veranstaltungen fanden speziell zu diesem Thema statt, um Ideen und Software unter die Leute zu bringen.
Ich glaube mich zu erinnern, dass man damals noch richtig miteinander redete.
Mit der Wende eröffneten sich neue Perspektiven und die Prioritäten änderten sich.
Die meisten AC1 sind ins persönliche Museum und später vielleicht auf den Müll gewandert.
Das Wissen, das wir uns in diesen Jahren angeeignet haben,
dürfte aber vielen den Einstieg in die neue Zeit erleichtert und das weitere Leben geprägt haben.
Es gab aber auch Enthusiasten, die das Projekt weiter verfolgt haben.
So erschien zum 25-jährigen Jubiläum der AC2010 im völlig neuen Design und
2017 wurde die fast originale Leiterplatte noch einmal neu aufgelegt.
Einen sehr guten Überblick über die Entwicklung bis heute bietet die Webseite von Johann
ac1-info.de.
Nach 40 Jahren haben wir überlegt, wie ein kompatibler AC1 heute aussehen könnte.
Daraus ist dieses Projekt entstanden.
Jeder, der sein Wissen auffrischen und den Schuhkarton mit Kassetten vom Dachboden holen möchte, ist herzlich eingeladen mitzumachen.
Den Enkeln bietet sich die Möglichkeit, einem Prozessor auf Augenhöhe und mit natürlicher Intelligenz zu begegnen.
Aufbau und Inbetriebnahme sollten an einem Wochenende möglich sein.
Die Bauelementekosten lagen im Herbst 2023 bei etwa 80€.
Aber eines muss klar sein:
In Puncto Rechenleistung kann auch ein modernisierter AC1 den aktuellen Plattformen und Mikrocontrollern nicht das Wasser reichen.
Viel Spaß und Erfolg wünschen
Frank DL7UFH & Jörg DL7VMD
Konzept
Folgende Mindestanforderungen soll der Retro-AC1 erfüllen:
- Kompatibilität durch Verwendung von Zilog-Komponenten CPU, PIO, CTC
- voll ausgebauter Speicher, 64k EPRom & RAM
- CP/M-fähig
- Micro-SD-Karte als Massenspeicher
- Anschluss von USB-Tastatur und VGA-Monitor
- Stromversorgung über 5V-USB-C-Steckernetzteil
- Einplatinenlösung, max. 25% der ursprünglichen Größe
- Verwendung aktuell handelsüblicher Bauelemente
- Aufbau mit Lötstation möglich (Ü65-tauglich)
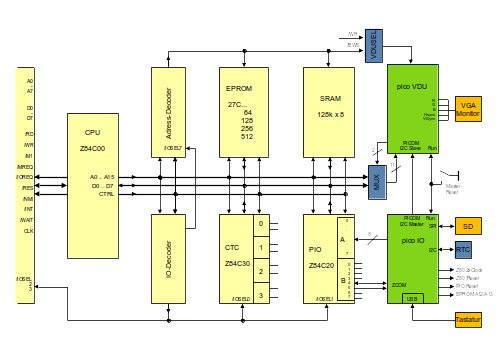
Bei der Renovierung des Konzeptes wurden die einzelnen Funktionsblöcke des AC1 betrachtet.
Basis war der Ausbaustandstand von 1989/90 mit dem Betriebssystem Monitor V3.1.
 Die Bestandssoftware soll eine kompatible Umgebung vorfinden.
Daher wird der Rechnerkern im Grundsatz aus dem Ur-AC1 übernommen.
Die Bestandssoftware soll eine kompatible Umgebung vorfinden.
Daher wird der Rechnerkern im Grundsatz aus dem Ur-AC1 übernommen.
Der Zilog-Prozessor und die zugehörigen Peripheriebausteine sind selbst nach über 40 Jahren noch im Handel erhältlich.
In der Typenreihe Z84C sind CPU, PIO und CTC in CMOS-Technik mit Taktfrequenzen bis 10 MHz verfügbar.
Update Sommer 2024 von Jörg / DL7VMD:
Mit Projektstart und Erstellung dieser Webseite waren die Zilog-ICs bei verschiedenen Händlern in großen Stückzahlen erhältlich.
Am 15.April 2024 hat Zilog nach 48 Jahren die Einstellung der Produktion der Z84-Reihe angekündigt.
Die Lagerbestände sanken daraufhin dramatisch.
Wer sich jetzt noch mit dem Gedanken trägt, in das Projekt einzusteigen, sollte vorab die Beschaffbarkeit von CPU, PIO und CTC prüfen.
Der gesamte adressierbare Speicherbereich wird mit einem EPROM und einem SRAM ausgebaut.
Durch die Reduzierung auf nur zwei Speicherbausteine wird der Platzbedarf des Kerns deutlich verringert.
Knapp die Hälfte des Ur-AC1 nahm die Bildschirmsteuerung ein.
Das Konzept dieses Blockes wurde grundlegend überarbeitet und
die gesamte Funktionalität in einen Raspberry Pico ausgelagert.
Anders als im damaligen AC1, in dem ein Teil des Arbeitsspeichers im Multiplexverfahren sowohl von CPU als auch von der VideoUnit (VDU) genutzt wurde,
steht nun der Bereich im Arbeitsspeicher allein der CPU zur Verfügung.
Der neue picoVDU kann Adress- und Datenbus mitlesen und wird getriggert,
sobald zu schreibende Bilddaten auf dem Bus anstehen.
Diese speichert der picoVDU und erzeugt so einen Spiegel des BWS.
Alle weiteren Prozesse zur Bildschirmausgabe laufen Pico-intern ab.
Im Resultat wird ein VGA-kompatibles Signal mit 640x480 Pixeln bei ca. 60Hz ausgegeben.
Zur Anzeige kann ein beliebiger VGA-Monitor genutzt werden.
Die Bezeichnung "Bildwiederholspeicher" entspricht nun nicht mehr der Funktion, soll aber der alten Zeiten willen beibehalten werden.
Ein weiterer großer Brocken im Ur-AC1 war die Tastaturlogik.
Hier kann nichts grundsätzlich neues erfunden werden, da es Anwenderprogramme gibt,
die die parallele Schnittstelle (PIO A) direkt abfragen.
Bis zu diesem Port muss alles beim Alten bleiben.
Die steuernde Tastaturlogik übernimmt ein zweiter Pico.
Da er hauptsächlich mit Ein-/Ausgaben beschäftigt wird, hat er die Bezeichnung picoIO erhalten.
Als Tastatur kann eine beliebige USB-PC-Tastatur genutzt werden.
Als Massenspeicher dient eine Mico-SD-Karte.
Sie ist FAT32/exFAT-formatiert und kann auch am PC geschrieben und gelesen werden.
An der PIO lässt sich zwar noch über PIO-PB 6/7 ein externes Kassetten-IF anschließen, um bspw. die alten Schätze zu retten,
eine sinnvolle Alternative zur SD-Karte stellen Kassetten aber nicht mehr dar.
Der picoIO übernimmt sowohl die Taktversorgung als auch die Resetlogik des Z80.
Beide Funktionen werden später näher beschrieben.
Außerdem kann ein RTC-Modul angeschlossen werden.
Dies ist sinnvoll, um Dateien mit der korrekten Uhrzeit zu speichern.
AC1-Anwendungen, die diese Funktion nutzen, existieren bisher nicht.
Bei der Suche nach einem geeigneten Controller fiel die Wahl auf den Raspberry Pico, da er verfügbar und preiswert ist.
Für die geplanten Funktionalitäten sind SW-Bibliotheken vorhanden und bei uns bestand zum Projektstart Basiswissen in dieser Technik.
Programmiert werden die beiden Pico mit dem
Pico-SDK
in C.
Die aktuellen Binaries sind im Repository abgelegt.
Das Flashen der Pico ist für jeden Anwender einfach möglich.
Klarer Nachteil der Pico ist der unterschiedliche Logikpegel zum Z80.
Der Rechnerkern kommt zwar an den meisten Eingängen mit dem 3.3V-Pegel des Pico zurecht.
Die 5V-Ausgänge dürfen dem Pico jedoch nicht direkt angeboten werden.
Hier sind Pegelwandler notwendig.
Die beiden Pico sind auch Namensgeber des Projektes: picoAC1
Zu guter Letzt sollte noch die Stromversorgung erwähnt werden.
Die Netzteile mussten im alten AC1 mit den Aufgaben wachsen.
25 bis 30W, die letztendlich in Wärme umgesetzt wurden, dürften keine Seltenheit gewesen sein.
Der Haushaltslüfter von AKA-Elektrik war festes Zubehör so manchen Rechners.
Da im picoAC1 die Schaltkreise in CMOS-Technik ausgeführt sind und die beiden Pico auch recht sparsam agieren,
kommt die Grundplatine mit weniger als 0,5 Watt aus.
Die 5V-Versorgung erfolgt aus einem Steckernetzteil über eine USB-C-Buchse auf der Grundplatine.
In den nächsten Kapiteln wird näher auf Details der Schaltung eingegangen.
Wer sich erst einmal einen Überblick verschaffen möchte, kann diesen Teil überfliegen oder gleich zum
praktischen Teil
springen.
Schaltung und Z80-Kern
Die Schaltung des Rechnerkerns mit CPU, PIO, CTC und Speicher entspricht im Grundsatz dem von Zilog vorgegebenen Standard.
Die Funktionsweise kann der
sehr ausführlichen
Doku zum Ur-AC1
entnommen werden.
Auf einige Besonderheiten soll an Hand des Schaltbildes eingegangen werden.
Speicher-Adresslogik
Der Z80 kann 64kBytes Speicher adressieren.
Diesen Bereich müssen sich EPROM und RAM teilen.
Bei der Adressierung werden zwei Modi unterschieden:
AC1 - Modus
CP/M - Modus
Nach einem Reset befindet sich der Rechner im AC1-Modus.
Das Betriebssystem erwartet dabei folgende Speicheraufteilung:
0000H ... 0FFFH - EPROM Monitor, ggf Minibasic
1000H ... 17FFH - RAM Bildwiederholspeicher (BWS)
1800H ... 18FFH - RAM Systemzellen
1900H ... FFFFH - RAM Arbeitsspeicher
Beim EPROM kann im picoAC1 zwischen 27C64, 27C128, 27C256 oder 27C512 gewählt werden.
Die Pinbelegung dieser Typen ist ähnlich.
Die Differenzen sind per Jumper auf der Platine anzupassen.
Die höhere Kapazität wird genutzt, um mehrere Monitorvarianten in den 4k-Bereich des Systems einzublenden.
Die CPU adressiert den EPROM über A0 .. A11.
Die Adresseingänge A12 und A13 werden über GPIO 14/15 des picoIO gesteuert.
In der Initialisierungsphase werden beide auf Low gesetzt.
Damit ist der untere 4k-Bereich des EPROMs aktiviert.
Per Funktionstasten sind die GPIO schaltbar, womit sich insgesamt vier 4k-Blöcke mit unterschiedlichen Monitorvarianten einblenden lassen.
Beim 27C64 sind es nur zwei Blöcke, da dort A13 nicht vorhanden ist.
Als SRAM wird ein 128 kBytes-Typ eingesetzt.
Hier sind keine Variationen möglich.
Durch die Verwendung von zwei 64k-RAM-Blöcken lässt sich der CP/M-Modus relativ einfach realisieren.
Die zentrale Schaltstelle in der Adresslogik bildet der BCD-Decoder U5 mit dem OR-Gatter U6D und dem D-Flip-Flop U8A.
Im AC1-Modus bleibt U8A dauerhaft inaktiv und beeinflusst den Decoder nicht.
Bei Speicherzugriffen decodiert U5 die anliegende Adressinformation der CPU in 2k-Schritten.
Wird der EPROM adressiert ist an U5 entweder O0 oder O1 low und
aktiviert damit den EPROM über dessen /CE-Eingang.
Auf der gleichen Leitung wird der SRAM über seinen (nicht invertierenden) CS-Eingang deaktiviert.
In allen anderen Adressbereichen bleiben O0 und O1 des U5 hight,
der SRAM wird über seinen CS freigegeben und der EPROM über /CE gesperrt.
Zusammen mit den CPU-Signalen /MREQ, /RD, /WR und der Diodenmatrix am Ausgang von U5 wird die Speicherlogik im AC1-Modus geregelt.
Innerhalb des RAM-Bereiches wird über O2 des Decoders gemeldet, dass der BWS adressiert wird.
Eine Verknüpfung mit /WR signalisiert der Video-Unit, dass zu schreibende Bilddaten auf dem Bus bereitstehen.
Soweit die Adresslogik im AC1-Modus - alles ganz einfach !
Nun kommt die CP/M-Kompatibilität ins Spiel.
Das Betriebssystem CP/M läuft im oberen RAM-Bereich.
Zur Initialisierung wird es im AC1-Modus dorthin geladen, angesprungen und übernimmt das Kommando über das System.
Im gesamten Adressbereich von 0000H bis zur Betriebssystemgrenze erwartet CP/M frei verfügbaren RAM.
Es duldet weder den EPROM ab 0000H noch den Bildwiederholspeicher ab 1000H.
Zur Ausblendung des EPROM wird der D-Flip-Flop U8A über einen Out-Befehl gekippt.
Dessen /Q-Ausgang wird low, womit alle Ausgänge von U5 H-Pegel führen.
Damit wird der EPROM dauerhaft deaktiviert und sämtliche Speicherzugriffe erfolgen im RAM.
Damit wäre das Problem des EPROM gelöst.
Beim Ausblenden des BWS kommt der zweite 64k-Block des SRAM ins Spiel.
Vor jeder Zeichenausgabe wird U8A wieder in Grundstellung gesetzt, was wiederum den Decoder U5 aktiviert.
Wird nun durch CP/M das Zeichen in den Speicherbereich 1000H - 17FFH geschrieben,
zieht der Decoder seinen Ausgang O2 auf low und sorgt dafür,
dass die Bilddaten in den "unteren" 64k-Block des SRAM geschrieben werden.
Danach wird U8A wieder aktiviert.
Der RAM-Arbeitsspeicher befindet sich also im "oberen" und der BWS im "unteren" 64-k-Block des SRAM.
So werden Kollisionen vermieden und die Funktion sichergestellt.
Erwähnt werden muss noch, dass auch der 2k-Bereich 1800H ... 1FFFH in den unteren SRAM-Block gekippt wird.
Das bewirkt, dass der System-RAM des AC1 vor dem Überschreiben durch CP/M gerettet wird und
ein sauberer Rücksprung vom CP/M in den AC1-Modus möglich wird.
Im Grunde trifft die Aufteilung des SRAM auch auf den AC1-Modus zu.
Hier ist es aber ein reines HW-Verhalten, bedingt durch die CP/M-Kompatiblität.
Aus Sicht der CPU und des Betriebssystems handelt es sich im AC1-Modus um einen durchgehenden Speicherbereich.
IO-Adresslogik
Die Logik zur Adressierung der Peripherie wird aus U4, U6A und U6B gebildet.
Jedem IO-Baustein werden vier 8Bit-Adressen zugeordnet.
IOSEL0: 00H .. 03H - CTC Grundplatine
IOSEL1: 04H .. 07H - PIO Grundplatine
IOSEL2: 08H .. 0BH - Erweiterung Systembus
IOSEL3: 0CH .. 0FH - Erweiterung Systembus
IOSEL4: 10H .. 13H - NC
IOSEL5: 14H .. 17H - NC
IOSEL6: 18H .. 1BH - NC
IOSEL7: 1CH .. 1FH - CP/M - Umschaltung
Systemtakt
Der Systemtakt der Z80-ICs wird vom picoIO an GPIO21 bereitgestellt.
Basis ist der picointerne 48MHz-USB-Oszillator.
Es sind beliebige ganzzahlige Teilerverhältnisse programmierbar.
Die Takterzeugung ist hardwarebasiert und hat keinen Einfluss auf die Rechenleistung des Pico.
Der Clockeingang des Z80 stellt spezielle Anforderungen.
Lt. Datenblatt muss die Spannung bei H-Pegel min. Vcc-0,6V, also 4,4V betragen.
Er lässt sich damit nicht direkt vom Pico ansteuern.
Zur Pegelwandlung ist der zweite D-Flip-Flop U8B zwischengeschaltet.
Als Nebenwirkung muss der picoIO die doppelte Frequenz liefern.
Der Ur-AC1 wurde mit 2MHz getaktet.
In späteren Ausbaustufen waren mit neuen Prozessoren auch 4MHz möglich.
Beim picoAC1 sind folgende Taktftrequenzen wählbar: 2 / 4 / 6 / 8 MHz.
Nach einem Reset des picoIO wird GPIO21 mit 4MHz initialisiert.
Durch den nachgeschalteten 2:1 Teiler ergibt dies einen Systemtakt von 2MHz.
Die anderen Taktraten sind per Funktionstasten wählbar.
Unter mehreren Aspekten muss der 8MHz-Takt jedoch als experimentell angesehen werden.
Resetlogik
Die Resetlogik des picoAC1 agiert in zwei Ebenen.
Ein Reset des Gesamtsystems erfolgt sowohl durch den Reset-Taster auf der Grundplatine, als auch durch "PowerOn".
Dabei werden beide Pico frisch initialisiert.
Der picoIO gibt für 100µs einen Low-Impuls an GPIO20 aus und resettet damit den Z80-Kern in der darunter liegenden Ebene.
Manuell kann ein Z80-Reset jederzeit durch die Tastenkombination Strg+Alt+Entf ausgelöst werden.
Dies beeinflusst die darüber liegende Pico-Ebene nicht.
Aus Pinmangel hat Zilog der PIO keinen eigenen Reseteingang spendiert.
Das Rücksetzen dieses IC erfolgt mit der Signalkonstellation: /M1=L /RD=H /IOREQ=H , die im normalen Programmablauf nicht vorkommt.
Im picoAC1 wird dazu /M1 an der PIO durch Q3 während des Reset auf Low gezogen.
GPIO19 liefert dazu einen inversen Reset.
Im Alt-AC1 gab es eine ähnliche Schaltung, nur wurde hier der H-aktive /M1 direkt an der CPU kurzgeschlossen.
Das war nicht ganz sauber.
Schadensmeldungen sind uns aber nicht zu ohren gekommen.
Im picoAC1 liegt in der /M1-Leitung ein 1k-Schutzwiderstand (R17) und Q3 direkt am PIO-Eingang.
Eine Kontrolle am Oszi zeigte, dass R17 keinen signifikanten Einfluss auf die Form von /M1 hat.
Bei Erweiterungsboards mit PIO muss dieser Reset separat generiert werden.
Video-Unit
Die Video-Unit (VDU) des picoAC1 hat keine Gemeinsamkeiten mit der Bildaufbereitung des alten AC1.
Dies ist aus Gründen der Kompatibilität auch nicht notwendig, da keine Rückwirkungen auf den Z80-Kern bestehen.
Es ist lediglich der Speicherinhalt des BWS auf dem Bildschirm darzustellen.
Die VDU greift nicht mehr auf den RAM des Arbeitsspeichers zu, sondern spiegelt die BWS-Daten in einem 2k-Array im picoVDU.
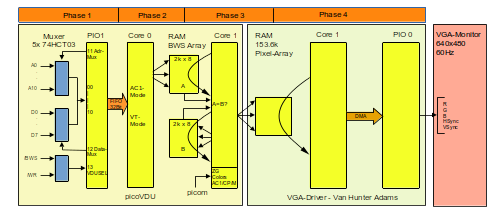
In der Skizze ist der Ablauf dargestellt, den man sich vierstufig, von links beginnend vorstellen kann.
Der Pico verfügt über zwei Kerne, die unabhängig voneinander arbeiten (Core 0/1),
außerdem zwei PIO (programmierbare Hardwareeinheiten).
Teil der VDU sind die 74HCT03 U9 - U13.
Hauptaufgabe dieser ICs ist die Pegelwandlung mit den zugehörigen Pullup-Widerständen.
Zur Einsparung von GPIO multiplexen sie Adress- und Dateninformationen auf gemeinsame Pico-Eingänge.
Die Funktionsweise der Eingangsstufe hat sich ab VDU-Version 1.2.x grundlegend geändert.
Vorgängerversionen sollten nicht mehr zur Anwendung kommen.
Geändert wurde nur die Software - keine Hardwareänderungen.
Phase 1
Adress- (A0..A10) und Datenleitungen des Z80 liegen an den Multiplexern U9..U13.
In Ruhestellung sind die Adressleitungen mit high von GPIO 11 an die GPIO 0..10 -Eingänge (negiert) durchgeschaltet.
Über den Adressdecoder U5 (/BWS) und /WR erhält der pVDU das Signal VDUSEL
sobald zu schreibende Daten für den BWS-RAM auf dem Bus liegen.
Das PIO-Programm wartet, bis an GPIO13 low-Pegel liegt.
Mit dem nächsten Assemblerbefehl werden die Adressdaten gelesen, gepuffert, die Adress-Muxer deaktiviert und die Daten-Muxer aktiviert.
Nochmal zum sacken lassen: Alles mit einem Assemblerbefehl in 8ns !
Die 74xx03-Muxer benötigen 20-30ns zum Einschwingen, bis die Daten nach der Umschaltung stabil an deren Ausgängen liegen.
Es wird gewartet, bis /WR inaktiv wird.
Bis dahin liegen die Daten sicher an und sind noch über eine ausreichende Zeit gültig.
Der nächste Befehl der Schleife wartet auf dieses Ereignis, VDUSEL (GPIO13) = high und veranlasst die Fortsetzung des Programmablaufs.
Der Datenbus wird eingelesen und gepuffert, die Daten-Muxer deaktiviert und die Adress-Muxer für die nächste Runde aktiviert.
Adressen und Daten liegen dann schon gemeinsam im 32-Bit-Input-Shift-Register (ISR), dessen Inhalt in einem letzten Befehl der Schleife in die FIFO-Pipeline geschoben wird, aus der Hauptkern 0 später lesen kann.
Dieser Befehl schließt mit drei Wait-Zyklen ab, bevor an den Schleifenanfang gesprungen und auf die nächsten Bilddaten gewartet wird.
.program vdumux
.side_set 2 opt
nop side 0b01
//Schleifenanfang
.wrap_target
wait 0 pin 13
in pins 11 side 0b10
wait 1 pin 13
in pins 8 side 0b01
push [3]
.wrap
//Schleifenende
Die Schleife besteht aus nur fünf (komplexen) Assemblerbefehlen.
Jeder Befehl wird in 8ns ausgeführt.
Die Konfiguration hat es allerdings in sich.
Der komplette Code ist in der Datei vdumux.pio im Quellcode-Verzeichnis zu finden.
Phase 2
Aufgabe des Core 0 - Prozesses ist die Prüfung der FIFO-Pipeline auf eingehende Daten.
Die Pipeline kann 8 Werte puffern, sodass Informationen nicht sofort verloren gehen,
falls in Ausnahmefällen der Z80 seine Daten schneller schreibt, als der nachfolgende Prozess sie verarbeiten kann.
Die 32Bit-Worte werden in der Reihenfolge des Einschreibens gelesen (FIFO-Prinzip).
Adressen und Daten werden gesplittet.
Die Negation der Daten durch die Multiplexer wird durch eine weitere Negation aufgehoben.
Bei den Adressen wird darauf verzichtet.
Das Zeichen links/oben erhält damit Adresse 0 im Array.
Im weiteren Ablauf wird nach Bildschirm-Modi unterschieden.
Der Klassiker ist der AC1-Modus.
Dabei wird das empfangene Byte auf die vorgegebene Adressposition im BWS-Array A geschrieben und anschließend sofort wieder an der Pipeline gelauscht.
Auf diese Weise wird ein Spiegelbild des Z80-BWS-Bereiches erzeugt und aktuell gehalten.
Dieser Modus wird auch für die CP/M-Versionen mit direkter Bildschirmadressierung aus dem BIOS verwandt.
Für picoCPM-VT wurde an dieser Stelle der VideoTerminal-Modus eingebaut.
Alle zu übertragenden Zeichen werden auf Z80-Seite byteseriell nur auf die Zeichenposition links/oben geschrieben.
Erst der Code im VT-Modul unterscheidet nach Steuercodes und darzustellenden Zeichen.
Steuercodes beeinflussen Darstellung und Position der folgenden Zeichen oder auch den Inhalt von Teilen oder des gesamten Bildes.
Wird das gesamte Bild gescrollt, kann der Pico an dieser Stelle zu langsam sein und der FIFO-Puffer muss in Anspruch genommen werden.
Erläuterungen zum VT-Modus sind in der CP/M-Beschreibung auf Codeberg zu finden.
In beiden Modi wird das Array BWS-A mit den auf ihrer Position anzuzeigenden Zeichen gefüllt.
Phase 3
In der Initialisierungsphase (Reset) wurde das Array BWS-B mit 00h initialisiert.
Ab Phase 3 übernimmt Core1.
Der Prozess läuft (zeit-)unabhängig von Phae 1 und 2.
Eine Endlosschleife durchsucht die Arrays BWS-A und BWS-B positionsweise auf Differenzen.
Stimmen beide Bytes überein, so wird bereits das richtige Zeichen auf dieser Position angezeigt und die Prüfung auf der nächsten Position fortgesetzt.
Bei einer Differenz muss diese Zeichenposition bearbeitet werden.
Aus dem gewählten Zeichengenerator (ZG) wird das darzustellende Zeichen geholt und
jedes Bit an der zugehörigen Position im Pixelarray gesetzt.
Eine "1" im ZG setzt das Pixel auf Zeichenfarbe und eine "0" auf Hintergrundfarbe.
Core1 schreibt das nun dargestellte Zeichen in das Array BWS-B für die nächste Runde des Vergleichslesens.
Phase 4
Dieser Prozess läuft komplett in der
VGA-Bibliothek
des Autors Van Hunter Adams.
Hieraus ist in den picoVDU der
Graphic-Kern
eingebunden.
Der Rest seines Repositories beinhaltet Beispielanwendungen.
Zur Darstellung ist ein Pixelarray mit 153600 Bytes in der Bibliothek reserviert.
Die Größe resultiert aus der Anzahlt der VGA-Pixel: 640*480 = 307200.
Ein Pixel hat eine Datenbreite von 3 Bit.
Jeweils 2 Pixel werden in einem Byte gespeichert, wobei 2 Bit ungenutzt bleiben.
Hieraus ergibt sich die feste Größe von 153.6 kBytes.
In einem Prozess in Core 1 werden die Pixel in ihrer Darstellungsreihenfolge in einen DMA-Channel geschrieben.
Die PIO-Logik des Pico sorgt für ein zeitgerechtes Auslesen und setzen der GPIO für die RGB- und Synchronsignale.
Bei den PIO handelt es sich um eigenständige, programmierbare Hardwareeinheiten des Pico mit denen Schnittstellen nachgebildet werden.
Es sind 2 Blöcke mit je 4 State-Machines vorhanden.
Der VGA-Treiber benutzt den Block 0.
Programmiert werden die PIO in Assembler.
Hierbei ist bemerkenswert, dass der Arbeitsspeicher nur maximal 32 Befehle aufnehmen kann,
also die komplette Aufbereitung des VGA-Signals in 32 Schritten erledigt wird.
Der Arbeitsspeicher wird dabei voll ausgenutzt.
Zeichengeneratoren und Darstellung
Im Alt-AC1 steckte ein ROM / EPROM in dem die Zuordnung der Pixel zu jedem der 256 darstellbaren Zeichen festgelegt war,
bei einem Raster von 6 Spalten x 8 Zeilen.
Bei 64 Zeichen mal 32 Zeilen ergibt das eine Darstellung von 384 x 256 Pixeln.
Der analoge BAS-Ausgang "matschte" das in etwa auf die verfügbare Bildfläche.
Am VGA-Ausgang hat das zur Folge, dass nur etwa ein Drittel der Fläche zur Darstellung genutzt wird.
Der Zeichengenerator ist als Array in der picoVDU-SW eingebunden.
Eine Skalierung wäre unter Berücksichtigung der Rechenleistung des Pico nur in ganzzahligen Schritten möglich.
Bereits der Faktor 2 ist aber schon nicht mehr darstellbar.
Für größere Darstellungen wurden von unserem Chef-Designer Jürgen (immer noch ohne Rufzeichen)
weitere ZG mit gleicher Darstellung, aber höherer Auflösung erstellt.
Per Funktionstasten sind folgende Einstellungen wählbar:
Zeichen Fläche Tastenkombination Bemerkung
6 x 8 384 x 256 Alt + F5 ZG des Ur-AC1
9 x 12 576 x 384 Alt + F6
10 x 14 640 x 448 Alt + F7
8 x 15 640 x 360 Alt + F8 80-Zeichen-Modus, nur im CP/M anwählbar
Der ZG 9x12 wird beim Systemstart als default festgelegt.
Er sollte bei allen VGA-Monitoren funktionieren.
In der 10x14-Darstellung kann es an den Rändern zu Problemen kommen.
Farben
Der Alt-AC1 kannte nur hell und dunkel.
Die Darstellung wurde durch den Monitor bestimmt.
Spätere AC1-Varianten ermöglichten farbige Darstellungen, dies jedoch unter Aufgabe der HW-Kompatiblität.
Im picoAC1 sind farbige Darstellungen als Abfallprodukt des VGA-Treibers möglich.
Für Zeichen- und Hintergrundfarbe kann aus 8 möglichen Farben (3 Bit) gewählt werden.
Eine dynamische bzw. zeichenweise Farbzuordnung ist weiterhin nicht möglich.
Folgende Farben stehen zur Verfügung:
0 - schwarz
1 - rot
2 - grün
3 - gelb
4 - blau
5 - magenta
6 - cyan
7 - weiss
Die Farbdarstellung ist kein wirkliches Feature, kann aber etwas Abwechslung fürs Auge bringen.
Auch für nichtlineare Geschmacksrichtungen ist so einiges dabei.
Sowohl die manuelle Auswahl des ZG als auch der Farben wird dem picoVDU via I2C-"PICOM"-Schnittstelle übermittelt.
Peripherie
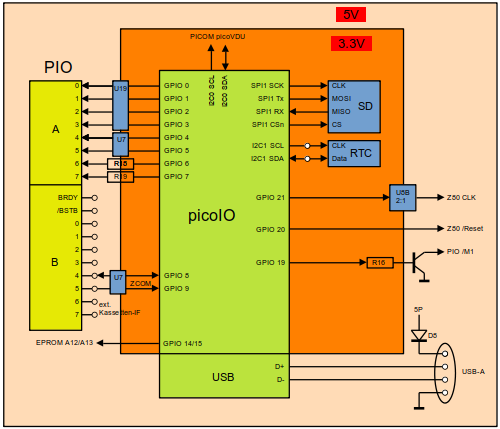
Ein zweiter Raspberry Pico, der picoIO, übernimmt weitere Funktionen in der Peripherie des Z80-Kerns.
Takterzeugung, Reset und die EPROM-Block-Adressierung wurden bereits erläutert.
In diesem Abschnitt geht es um Tastatureingaben, Massenspeicher, Systemzeit und die internen Kommunikationskanäle.
In der Skizze sind die unterschiedlichen Spannungszonen zu beachten.
Tastaturlogik
Im Alt-AC1 wurde als Tastatur genutzt, was man hatte oder auftreiben konnte.
Dementsprechend vielfältig waren die Tastaturelektroniken.
Allen gemeinsam ist die Schnittstelle zum PIO-Port A.
An Bit 0..6 liegt der
ASCII-Code
des einzugebenden Zeichens,
an Bit 7 der Tastaturstatus (H-aktiv).
Dieses Verhalten muss auch im picoAC1 erhalten bleiben, da einige Anwenderprogramme direkt auf diese Schnittstelle zugreifen.
Gesteuert wird die Ausgabe an GPIO 0..7 des picoIO.
Grundsätzlich wäre es möglich, die Pico-Ausgänge direkt mit den PIO-Eingängen zu verbinden.
Da aber nicht auszuschließen ist, dass ein Anwenderprogramm den Port A als Ausgang setzt, sind zum Schutz Levelshifter zwischengeschaltet.
Ein 4-fach-LVS U19 wurde extra für diesen Zweck projektiert, zwei freie Bit aus dem vorhandenen LVS U7 genutzt und schließlich für zwei Bit lediglich ein Schutzwiderstand vorgesehen.
Nicht ganz übersichtlich, es erfüllt aber seinen Zweck.
Der Einsatz der LVS hält die Möglichkeit offen, einen weiteren bidirektionalen Kommunikationskanal zwischen Z80 und picoIO zu schalten.
Als Eingabegerät dient eine normale USB-PC-Tastatur.
Verbunden wird sie über den USB-Anschluss des picoIO.
Eine direkte Anschaltung ist jedoch nicht möglich, da an der USB-Buchse des picoIO keine Betriebsspannung anliegt.
Die 5V werden an der USB-A-Buchse auf der Grundplatine zugeführt.
Es ist ein kurzes Adapterkabel zwischen der Micro-USB-Buchse und J8 anzufertigen.
D8 schützt die Schaltung vor unzulässiger Spannungszuführung über die USB-A-Buchse.
Sobald die Tastatur als HID-Device durch den Treiber erkannt wird, leuchtet die Onboard-LED die picoIO.
Auch Tests mit verschiedenen drahtlosen Tastaturen waren erfolgreich.
Tastaturen, die am PC versuchen Treiber nachzuladen, werden hier nicht funktionieren.
Als Tastaturtreiber ist die
Tiny-USB-Lib
, die Bestandteil des Pico-SDK ist, ins Programm eingebunden.
Ein Tastendruck löst ein Ereignis aus, das auf Anwenderprogrammebene abgefragt und ausgewertet wird.
Übergeben wird ein der Taste zugeordneter Scancode und ein Set von Modifikatoren (Strg, Shift, Alt..).
SD-Card-Interface
Das Kassettentonbandgerät hat als Massenspeicher ausgedient.
An seine Stelle tritt die Micro-SD-Karte.
Selbst "kleine" Karten dürften mehr Daten aufnehmen, als jemals Programme für den AC1 geschrieben wurden.
Wer seinen Schuhkarton mit den alten Schätzen wiederbeleben möchte, kann aber noch ein externes Kassetten-IF an PIO-PB6/7 anstecken.
Die Monitorroutinen "S" und "L" sind weiterhin verfügbar.
Das SD-Card-Shield ist per SPI-IF mit dem picoIO verbunden.
Master ist der Pico.
Die Taktfrequenz beträgt 12.5MHz.
Funktionstests mit verschiedenen Karten liefen erfolgreich.
Zwei Uralt-Typen, die am PC funktionierten, haben jedoch am picoIO den Dienst verweigert.
Hier brachte auch die drastische Herabsetzung des SPI-Taktes keine Änderung.
Evtl. unterstützen diese Karten kein SPI.
In diesem Fall hilft nur probieren.
Die Software basiert auf der generischen
FatFs-Bibliothek
von Elm Chan, die auch für Kompatibilität mit dem PC sorgt.
Die Anpassung an den Raspberry Pico stammt von
carlk3,
die bis auf kleine Änderungen in die picoIO-SW eingebunden wurde.
Die Datenübertragung mit dem Z80 erfolgt seriell über PIO-PB4/5.
Diese Schnittstelle wurde ZCOM getauft.
Die Funktionsweise wird in einem späteren Kapitel beschrieben.
Die SD-Karten werden am PC mit FAT32 oder exFAT formatiert.
Andere Formate wurden nicht getestet.
Hinweise zur Bedienung sind in der Beschreibung zur Monitorerweiterung zu finden.
Real-Time-Clock
Der Pico bringt zwar von Hause aus eine interne Echtzeituhr mit, die jedoch nicht batteriegepuffert ist und bei jedem Bootvorgang neu gestartet wird.
Zur Übernahme der korrekten Zeit, lässt sich ein RTC-Modul DS3231 (5pol.) anstecken.
Die Kommunikation läuft über einen I2C-Kanal des picoIO.
Nach jedem Booten wird die aktuelle Zeit am Modul abgefragt und die Pico-interne Uhr gesetzt.
Genutzt wird die interne Zeit durch die FatFS-Bibliothek beim Speichern von Dateien.
Das RTC-Modul muss nicht zwingend für die Funktion des picoAC1 vorhanden sein.
Die Uhr kann auch nach jedem Start per Hand gestellt werden oder man lebt einfach mit dem falschen Dateidatum.
Die Programmierung der Zeit erfolgt auf der AC1-Kommandozeile in ME(S)Z, s. Beschreibung der Monitorerweiterung.
ZCOM - Kommunikation Z80 <--> picoIO
Die Datenkommunikation zwischen Z80(PIO) und dem picoIO läuft über eine synchrone, serielle Verbindung.
Vorbild ist die I2C-Schnittstelle, durch Verzicht auf Overhead jedoch stark vereinfacht.
Master ist der Z80.
Die Z80-PIO gibt an PB5 den Takt vor, der an GPIO9 des Pico empfangen wird.
Daten werden zwischen PB4 und GPIO8 bidirektional nach einem proprietären Protokoll ausgetauscht.
Picoseitig bildet der PIO-Block 0 mit seinen SM0 (Empfang) und SM1 (Senden) die Schnittstelle zum Pico-Core 1.
Die Kommunikation wird grundsätzlich vom Z80 angestoßen.
Je Flankenwechsel des Taktes wird ein Datenbit übertragen.
Daten sind immer zu 8 Bit organisiert.
Ein Byte startet mit Bit 0 an der L/H-Flanke der Taktleitung.
Dies sind die Grundlagen.
Alles Weitere ist abhängig vom auszuführenden Befehl.
Die Übertragungsgeschwindigkeit richtet sich nach der Befehlsabarbeitung im Z80.
Das Speichern von 32kB dauert bei 8MHz ca. 3 Sekunden.
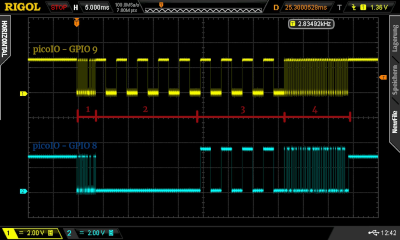 Im Bild ist am Beispiel des Kommandos "t" der grundsätzliche Ablauf bei einem Rechnertakt von 2MHz dargestellt.
Dieser lässt sich in vier Phasen unterteilen.
Im Bild ist am Beispiel des Kommandos "t" der grundsätzliche Ablauf bei einem Rechnertakt von 2MHz dargestellt.
Dieser lässt sich in vier Phasen unterteilen.
Kanal A (gelb) zeigt die Taktleitung, auf der ausschließlich der Z80 sendet.
Kanal B (blau) stellt die bidirektionale Datenleitung dar.
Im Ergebnis liefert der picoIO eine Zeichenkette mit aktuellem Datum/Uhrzeit (25Bytes).
Phase 1
Z80 sendet 32bit Masterkey zur Identifikation
Z80 sendet Kommando "t *"
Phase 2
Richtungswechsel Datenleitung (Z80 = Rx / picoIO = Tx)
Z80 sendet verzögerte Takte
Befehlsbearbeitung im Pico (hier: Bereitstellung Ergebnisstring)
picoIO sendet 4 Takte Daten "low"
Phase 3
picoIO sendet Synchronbyte 0x55
Phase 4
picoIO sendet Zeichenkette "UTC: 2024-01-14*14:11:06:04" 0x00
Die anderen Kommandos unterscheiden sich in Phase 1 und 4 durch die Menge der zu übertragenden Daten
und in Phase 2 durch die Bearbeitungszeit im Pico.
Sollte der picoIO nach 3000 Flankenwechseln (Taktleitung) die Befehlsbearbeitung nicht abgeschlossen haben und damit kein Synchronbyte senden,
geht die Verbindung in einen TIMEOUT.
PICOM - Kommunikation picoIO <--> picoVDU
Beide Pico kommunizieren über eine I2C-Schnittstelle nach gängigem Protokoll.
Master ist der picoIO.
Dem picoVDU werden hierüber Anweisungen zur Darstellung,
wie Auswahl des Zeichengenerators und der Farben übermittelt.
Stromversorgung
Der picoAC1 benötigt eine 5V-Spannungsversorgung.
Die Zuführung erfolgt über die USB-C-Buche U20 auf der Grundplatine.
In unseren Musteraufbauten haben wir Stromaufnahmen von etwa 80mA gemessen.
Dazu kommen ca. 10mA für die Tastatur.
Drahlose Tastaturen genehmigen sich einige mA mehr.
Der SD-Karte wird nachgesagt, dass Spitzen bis zu 100mA möglich sind.
Setzt man insgesamt 500mA an, bleiben Reserven für Erweiterungen und ein USB-C-Netzteil sollte damit nicht überfordert sein.
Das Netzteil sollte nicht intellegent sein.
Das spart Nerven bei der Fehlersuche.
Ein Steckernetzteil des Raspberry Pi4 wäre hier die richtige Wahl.
Die 3.3V erzeugt der Pico onboard mit einem DC/DC-Converter für den Eigenbedarf und seine Umgebung.
An Pin36 des Pico können bis zu 300mA entnommen werden.
Die Transistoren Q1 und Q4 schützen vor Konflikten auf der 5V-Leitung,
falls die Pico im gesteckten Zustand und eingeschaltetem Gerät per USB mit dem PC verbunden werden.
Das Anlegen von 5V an der USB-Buchse des Pico bewirkt das Sperren des jeweiligen Transistors.
Damit wird der Pico vom Rest der 5V-Versorgung getrennt.
Durch die Zuführung der 5V an Pin39 des Pico wird dessen USB-Buchse nicht mit Spannung versorgt.
Daher ist es nicht möglich die Tastatur direkt anzustecken.
Dies erfolgt über die USB-A-Buche J3.
Hier wird die Spannung über D8 zugeführt, die eine versehentliche Rückwärtsspeisung verhindert.
Aufbau
In diesem Kapitel werden Hinweise zum Aufbau und zur Beschaffung der Leiterplatte gegeben.
Der Umfang dieser Beschreibung kann es mit dem Original von 1983-85 nicht aufnehmen.
Dies ist aber auch nicht notwendig, da im picoAC1 weniger Fehler möglich sind.
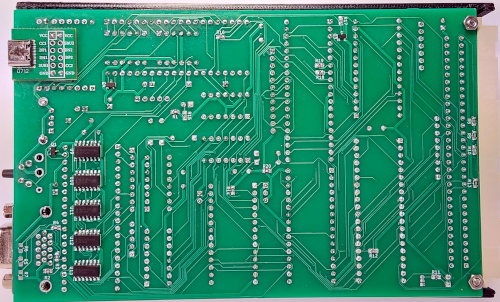
Leiterplatte
Die Leiterplatte des Alt-AC1 hatte eine Grundfläche von 250x300mm.
Tagelanges bohren und nächtelanges löten waren die Hauptarbeiten beim Aufbau.
Die Bauelemente des picoAC1 finden auf einer Fläche von 160x100mm Platz.
Bei Auftragsfertigern lassen sich Platinen bestellen, die gebohrt und durchkontaktiert geliefert werden.
Damit waren unsere Testaufbauten nach 4 bis 8 Stunden betriebsfertig.
Als Hersteller der Musterplatinen haben wir uns für die Firma
JLCPCB
entschieden.
Der Bestellvorgang ist simpel und die Firma produziert und liefert zu einem unglaublich günstigen Preis.
Wer es probieren möchte, sollte ein Benutzerkonto anlegen,
sich anmelden,
die
Gerberdaten
als zip-File hochladen und dem Bestellvorgang folgen.
Die voreingestellten Daten ergeben sich aus den Gerberfiles und können übernommen werden.
Ein paar persönliche Daten muss man natürlich auch nach China liefern.
Klar, die Leiterplatten sollen ja zuhause ankommen.
Nachteil ist die Mindestbestellmenge von 5 Stück.
Es ist mit einer Lieferzeit von etwa zwei Wochen zu rechnen.
Die Gesamtkosten für fünf Platinen incl. Versand und Zoll lagen im Sep 2023 bei 22€.
Alternativ lassen sich andere Auftragsfertiger auch in Europa finden.
Auch wenn der picoAC1 ein tolles Gerät ist, wird niemand fünf Stück aufbauen wollen.
Um überzählige Platten loszuwerden, bietet sich das
Robotron-Forum
an.
Dabei setzen wir voraus, dass die Abgabe zum Selbstkostenpreis erfolgt.
Bauelemente
Bei der Auswahl der Bauelemente wurde auf gute Handhabbarkeit geachtet.
Größtenteils kommen Schaltkreise im DIL-Gehäuse und Bauelemente mit Drahtanschlüssen zum Einsatz.
Um die angestrebte Leiterplattengröße einzuhalten, musste jedoch auf einige SMD zurück gegriffen werden.
Das Rastermaß von 1.27mm wird dabei nicht unterschritten.
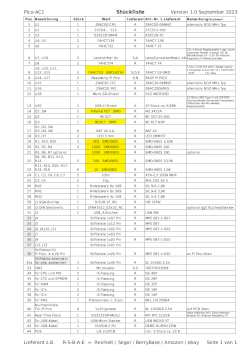
In der Tabelle sind die benötigten Beiteile zusammengefasst und Bezugsmöglichkeiten (Stand Nov.2023) vorgeschlagen.
Leider haben wir keinen Händler gefunden, der alles in seinem Sortiment führt.
Subboards wie Levelshifter und USB-C-Shield sind bei Amazon in Familienpackungen oft günstiger erhältlich.
Der direkte Anbieter wechselt allerdings häufig.
In der Spalte Bemerkungen ist ein Suchtext angegeben, der zum Ziel führen kann.
Zur Beschaffbarkeit der Zilog-ICs bitte das Update vom Sommer 2024 im Abschnitt
Konzept
beachten !
Es bestehen keine wirtschaftliche Abhängigkeiten zwischen den vorgeschlagenen Firmen und unserem Projektteam !
Für die Zilog-Komponenten kamen in den Musteraufbauten 6MHz und 10MHz-Versionen zum Einsatz.
Dabei zeigte sich, dass auch die 6MHz-Varianten bei 8MHz Systemtakt ihren Dienst verrichteten.
Eine Garantie gibt es dafür allerdings nicht.
Mittlerweile wurden erfolgreich
Overclocking
-Experimente mit 12MHz Takt absolviert.
Daher sind die 10MHz-Varianten zu empfehlen.
Als EPROM kommen 27C64, 27C128, 27C256 oder 27C512 in Frage.
Falls der IC mit dem
picoBurner
programmiert werden soll, scheidet der 27C512 aus.
27C256 und 27C512 sind handelsüblich.
Auch ein EEPROM 29C256 wurde erfolgreich getestet.
Diese Teile sind allerdings neu nicht mehr beschaffbar.
Achtung: Es werden auch PROMs unter der Bezeichnung OTP-EPROM (One-Time-Programmable) angeboten.
Das Schnäppchen wird so schnell zum Elektronikschrott.
Ein Blick in das Datenblatt vermeidet Fehlkäufe.
Alle Logik-Schaltkreise kommen aus der 74HCT-Familie.
Die 74HCT03 werden in der Gehäuseform SO14 benötigt, alle anderen in DIL14 bzw DIL16.
Die Raspberry Pico können in Normalausführung oder H-Variante mit vormontierten Stiftleisten eingesetzt werden.
Beide Pico müssen steckbar montiert werden, d.h. passende Buchsenleisten werden benötigt.
Update September 2024:
Benötigt wird der Raspberry Pico in der ursprünglichen Version (RP2040).
Die im Projekt bereitgestellte Firmware lässt sich nicht auf dem kürzlich erschienenen Pico2 (RP2350) installieren !
Solange der alte Pico verfügbar ist, planen wir keine Migration und die damit verbundene Pflege unterschiedlicher Zielplattformen.
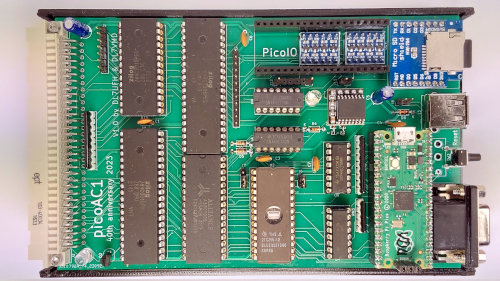
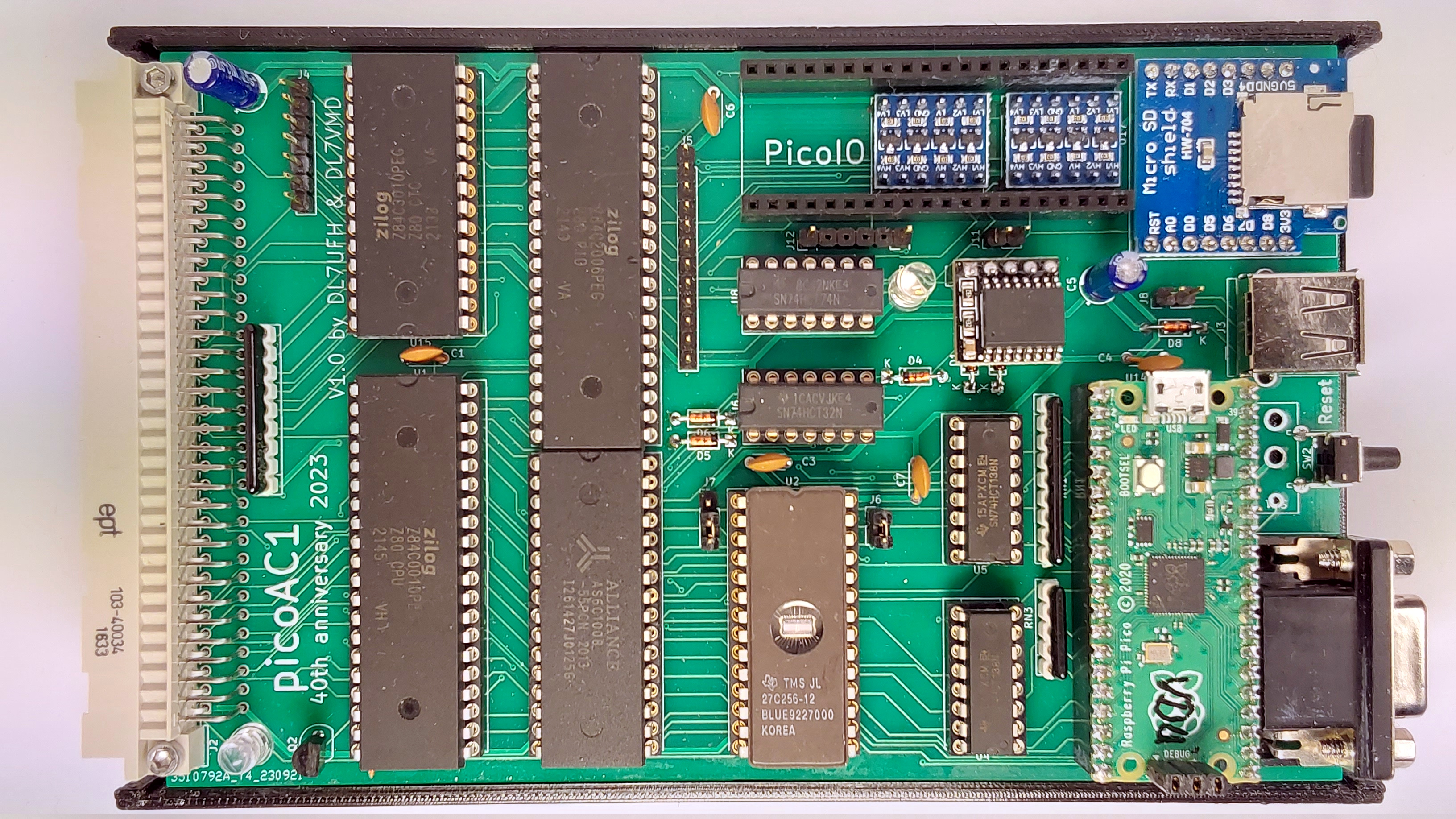
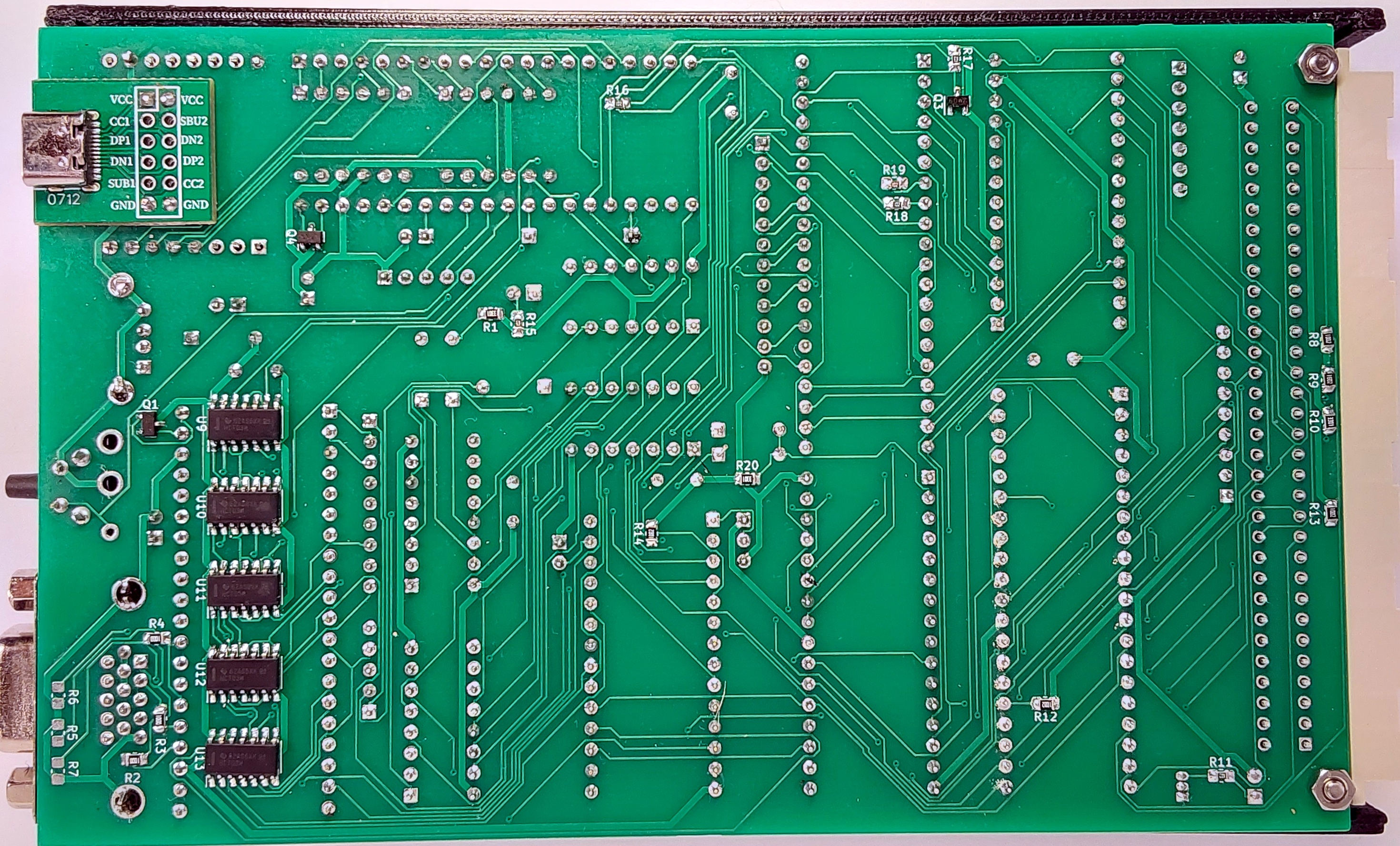
Aus den Fotos oben ist zu entnehmen, welche Modulbauformen zum Layout passen.
Speziell sind dies 4-fach Levelshifter, SD-Shield, RTC und auf der Rückseite das USB-C-Modul.
Zur Verbindung der USB-Buche des picoIO ist ein kurzes Adapterkabel anzufertigen.
Das ist am einfachsten aus einem überzähligen Micro-USB-Datenkabel hergestellt.
D-(2) und D+(3) ausklingeln und eine 2-pol. Buchsenleiste anlöten.
Über die Anschlussleisten J4 und J5 werden die verfügbaren Ports von PIO und CTC nach außen geführt.
Im Muster sind Stiftleisten eingebaut.
An diesen Stellen können auch Buchsenleisten eingesetzt werden.
Verzichtbares oder nice to have
Nicht alle Bauelemente werden zur Inbetriebnahme des picoAC1 benötigt.
Einige können bei Bedarf nachgerüstet und andere komplett weggelassen werden.
Im Schaltbild von links beginnend:
J2 Steckverbinder f. Erweiterungen
Dieser Steckverbinder sollte erst eingebaut bzw. gelötet werden, wenn dafür Bedarf besteht und die Bauform klar ist.
RN2 Widerstandsnetzwerk, Datenbus pullup
Allgemeine Regeln besagen, dass CMOS-Eingänge nicht floaten dürfen.
Dies passiert aber auf dem Datenbus, wenn die CPU keine Daten schreibt oder anfordert.
RN2 zieht daher die Datenleitungen auf H-Potential.
In den Mustern hat sich gezeigt, dass diese Pullup-R zur Funktion nicht erforderlich sind
und sich bei Übertaktung sogar negativ auswirken können.
Es ist zu empfehlen, RN2 auf eine passende Fassung zu setzen, um nach Bedarf entscheiden zu können.
D3, R11, Q2
D3 zeigt den Haltzustand der CPU an.
LEDs ergeben nur Sinn, wenn sie im Gehäuse nach außen geführt sind.
Die Notwendigkeit muss individuell entschieden werden.
D7, R15
D7 zeigt den Betriebsmodus (AC1 an | CP/M aus) an, s.o..
R5, R6, R7 Spannungsteiler, VGA-Ausgang
In den ersten Musteraufbauten wurden die Längswiderstände R2, R3, R4 mit 100Ω bemessen.
Damit lag Vss an den RGB-Pins bei 1.2V.
Die Querwiderstände R5, R6, R7 sollten zum einen den Normpegel von 0.7V herstellen und zum anderen die Ausgangsstufen an die Leitungsimpedanz anpassen.
Dabei zeigte sich jedoch eine hohe Belastung der GPIO-Ausgänge.
Daher wurden R2, R3, R4 auf 220Ω erhöht.
Der Normpegel wird damit erreicht, sodass R5, R6, R7 nicht eingebaut werden sollten.
Eine Verschlechterung der Bildqualität durch die Fehlanpassung konnte subjektiv nicht festgestellt werden.
RTC Echtzeituhr
An J9 kann ein RTC-Modul DS3231 gesteckt werden.
Zur Inbetriebnahme ist das Modul nicht erforderlich.
Bei Verwendung ist auf kompatible Pinbelegung und 3.3V Betriebsspannung zu achten.
J10, J11, J12, J13 Debug-GPIO
Über die genannten Jumper sind freie GPIO des picoVDU und des picoIO herausgeführt.
Diese werden derzeit zum debugen der Pico-SW verwendet, bleiben also im normalen Betrieb offen.
In späteren Anwendungen können diese Ports Steuerungsaufgaben übernehmen.
Zusätzliches
Bei Verwendung der SCCH-Monitore ist es erforderlich, den PIO-Port B2 über einen Pullup-R auf H-Pegel zu ziehen.
Hierzu kann bspw. ein 10kOhm-Widerstand über J5 Pin 9 und 12 gejumpert werden.
PB2 nutzen die SCCH-Monitore, um mit Low in einen Grafik-Eingabe-Modus umzuschalten.
Da der Pegel am offenen PIO-Eingang nicht definiert ist, kann es zu fehlerhaften Tastatureingaben kommen.
Die Run-Eingänge der Pico (Pin30) zeigen sich empfindlich gegenüber Spannungsspitzen, die bspw. bei kurzzeitigen Masseberührungen entstehen.
Das Antippen einer Massefläche mit einem Schraubendreher kann zum Auslösen eines Resets eines oder beider Pico führen.
Dies ist abhängig von der Umgebung und bestehenden, festen Masseverbindungen zum Gerät.
Zur Minderung dieses Effektes können die Run-Eingänge mit zusätzlichen Scheiben-C gegen Masse bedämpft werden.
Hierzu kann bspw. ein 100nF-C über den alternativen Reset-Taster SW2 gelötet werden.
Subjektiv bessere Ergebnisse lassen sich mit Kondensatoren erzielen, die auf der Oberseite der Pico zwischen Pin30 (Run) und Pin28 (GND) gelötet werden.
Bauelemente im Huckepackverfahren haben schließlich eine lange Tradition im AC1.
Bestückung
Bevor der Lötkolben angeworfen wird, sollten vielbeinige Bauelemente auf ihre Passgenauigkeit geprüft werden.
Negative Erfahrungen gab es mit der VGA-Buchse.
Ggf. müssen die beiden äußeren Reihen in Richtung Mittelreihe gebogen werden.
Beim Einsetzen der ICs bzw Fassungen ist auf die Ausrichtung jedes Bauteils zu achten !
Als erstes werden die SMD-Bauteile auf der Unterseite gelötet.
Danach folgt das USB-C-Shield.
Zum besseren Halt sollte es mit Sekundenkleber auf der Leiterplatte befestigt werden.
Beide Flächen aufrauen, Shield an den Bohrlöchern zentrieren und verkleben.
Nach dem Löten lohnt es schon einmal, die 5V-Spannung und deren Polarität zu prüfen.
Nachdem das SD-Shield auf der Oberseite montiert ist, sind die Lötstellen des USB-Shield nicht mehr zugänglich !
Danach folgen die Bauteile auf der Oberseite.
Es wird empfohlen, alle ICs auf Fassungen zu setzen.
Beim Einlöten der Fassungen von PIO und SRAM sollten die Toleranzen der Bohrungen ausgenutzt und auf den größtmöglichen Abstand der beiden Elemente geachtet werden.
Auch RN2 sollte auf eine 9-polige Reihe gesteckt werden.
Picos, SD-Shield und Levelshifter werden mit den zugehörigen Stiftleisten bestückt.
Der 3-polige Anschluss an der Kopfseite des Pico muss nur zum Anschluss eines Debuggers beschaltet werden.
Nicht steckbar, sondern direkt gelötet werden die beiden Levelshifter U7, U19 und das SD-Shield U18.
Die Rahmen der Stiftleisten sorgen für das richtige Höhenmaß.
Zum Schluss werden die VGA-Buchse und anschließend die Buchsenleisten der Pico gelötet.
Zur korrekten Ausrichtung hat es sich bewährt dabei einen Pico zu stecken.
Steckbare Bauelemente sollten erst während der Inbetriebnahme stufenweise eingesetzt werden.
Den Aufbau hat Gerd mit einigen
Fotos
dokumentiert, die man sich anschauen sollte, bevor es ans Werk geht.
Inbetriebnahme
Die zur Inbetriebnahme benötigten Dateien sind im
Projekt-Repository
auf Codeberg.org zu finden.
Benötigt werden:
- der AC1 - EPROM
- die picoIO-Firmware
- die picoVDU-Firmware
Pico flashen
Die Picos müssen zum Flashen nicht gesteckt sein.
Falls sie auf dem Board stecken, ist die Stromversorgung des picoAC1 vorher zu trennen.
Ansonsten lässt sich der Pico im nachfolgenden Schritt nicht in den Flashmodus versetzen.
Achtung:
Die bereitgestellte Firmware ist für die ursprüngliche Version des Pico mit dem Microcontroller RP2040 gebaut.
Die Dateien lassen sich nicht auf dessen Nachfolger "Pico2" (RP2350) flashen.
Am Pico die BOOTSEL-Taste drücken, anschließend das Board per USB-Kabel mit dem PC verbinden und BOOTSEL wieder freigeben.
Auf dem Desktop öffnet sich ein Fenster des Dateimanagers.
Der Pico verhält sich nun wie ein USB-Stick.
Per Drag & Drop das passende File ins Fenster ziehen.
Danach schließt sich der Dateimanager.
Fertig !
Alternative Reihenfolge, um bei gestecktem Pico in den Flashmodus zu gelangen:
Pico mit dem PC verbinden --> BOOTSEL-Taste drücken --> RESET-Taste auf der Grundplatine kurz drücken --> BOOTSEL wieder freigeben.
Aber auch hier wird empfohlen, den AC1 zuvor von der StrV zu trennen.
Der Vergleich mit einem USB-Stick ist hier allerdings stark vereinfacht.
Im Dateimanager wird nicht der Programmspeicher des Pico angezeigt, sondern nur ein virtuelles Verzeichnis mit zwei Infodateien.
Das UF2-File wird nach dem Kopieren Pico-intern zerlegt und in den Flash-ROM geschrieben.
War dies erfolgreich, wird die neue Firmware nach dem anschließenden Reboot ausgeführt.
Bei der nächsten Flash-Prozedur wird wieder nur das oben beschriebene Fenster angezeigt, ohne einen Hinweis darauf, dass bereits eine Firmware im Flash gespeichert ist.
EPROM brennen
Auf EPROMs stößt man in modernen Projekten nicht mehr.
Dementsprechend dünn dürfte die persönliche Infrastruktur sein.
Wer noch einen Brenner hat oder jemanden kennt, ist fein raus.
Neue Brenner sind im Versandhandel bestellbar.
Damit würde das Projektbudget allerdings weit überschritten.
Und man sollte sich fragen, ob sich die Anschaffung lohnt.
Wie ein EPROMer mit Hilfe eines Pico, zweier Levelshifter, einiger diskreter Bauteile und vieler Drahtverbindungen aufgebaut werden kann,
ist auf der Seite
picoBurner
beschrieben.
Hiermit könnte aber das Zeitbudget von einem Wochenende überschritten werden.
Und eines soll nicht verschwiegen werden, EPROMs müssen vor dem Wiederbeschreiben gelöscht werden.
Wer keine Möglichkeit sieht, die Probleme zu lösen, fragt mal im
Robotron-Forum
nach oder schickt eine email an unsere Projektadresse.
Inbetriebnahmephasen
Die Inbetriebnahme sollte schrittweise erfolgen, um Fehler gezielter suchen zu können.
Es ist sinnvoll, die Stromaufnahme in der jeweiligen Phase zu messen.
Perfekt wird das Ganze mit einem geeigneten Labornetzteil und Strombegrenzung.
Die angegebenen Stromaufnahmen können nur als Richtwerte angesehen werden.
Durch die stufenweise Bestückung kommt es zu floatenden CMOS-Eingängen,
die zu undefinierten Schaltzuständen und schwankenden Stromaufnahmen führen.
Schritt 1
Im ersten Inbetriebnahmeschritt sollten sich keine steckbaren Bauelemente auf dem Board befinden.
So lässt sich, ohne größeren Schaden befürchten zu müssen, Spannung anlegen und an den Fassungen messen.
Stromaufnahme: ca. 4 - 10mA
Schritt 2
 Im nächsten Schritt (spannungsfrei !) werden die 74HCT-ICs, die Pico und die CPU gesteckt.
Für diesen Test muss RN2 installiert sein, um 0xFF auf dem Datenbus zu simulieren.
Im nächsten Schritt (spannungsfrei !) werden die 74HCT-ICs, die Pico und die CPU gesteckt.
Für diesen Test muss RN2 installiert sein, um 0xFF auf dem Datenbus zu simulieren.
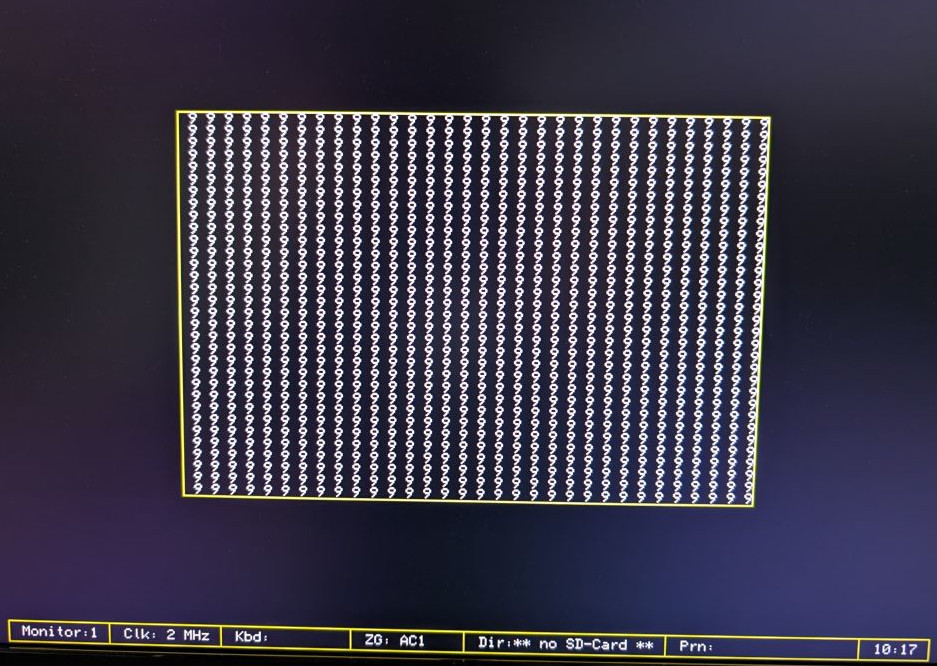
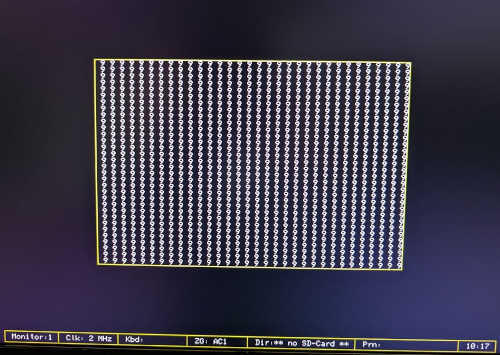
Letzte Chance zu prüfen, ob alle ICs richtig gedreht sind !
Dann das VGA-Kabel anschließen und Versorgungsspannung anlegen.
Auf dem Monitor sollte nebenstehendes Muster erscheinen.
Die CPU liest den Befehlscode FFh (RST38), spring zur Adresse 38h und schreibt 0039h auf den Stack.
Der Stackpointer wird dekrementiert und mit dem nächsten Befehl wieder FFh gelesen, usw.
Der gelbe Rahmen und die Statuszeile werden auf Pico-Ebene, ohne Beteiligung des Z80 generiert.
Damit funktionieren schon mal die CPU und beide Pico.
Stromaufnahme: ca. 65mA
Schritt 3
Der picoAC1 ist wieder spannungsfrei.
Jetzt wird der EPROM gesteckt.
Die Jumper J6 und J7 sind entsprechend des verwendeten EPROM-Types zu setzen.
Die Belegung ist dem Schaltbild zu entnehmen.
Nun werden SRAM und PIO gesteckt.
Zwischen beiden geht es etwas eng zu.
Hier stimmen die Gehäusemaße bei Kicad nicht mit der tatsächlichen Welt überein.
Es kann helfen, beide IC gleichzeitig zu stecken, dabei aber alle Pins im Auge behalten.
Zum Schluss noch die CTC stecken.
Diese ist gegenüber den anderen "dicken" ICs um 180° gedreht !
Auch wenn ich damit nerve: Prüfen, ob alle ICs richtig gesteckt sind !
Nach Anlegen der Spannung sollte die Monitorausschrift und der blinkende Cursor zu sehen sein.
Stromaufnahme: ca. 70mA
Schritt 4
Im letzten Schritt wird die USB-Buchse des picoIO mit der Stiftleiste J8 verbunden und die Tastatur angesteckt.
Auf dem picoIO muss nach kurzer Zeit die Onboard-LED leuchten.
Ist das nicht der Fall, sollte die Polarität des Adapters geprüft, ggf. gedreht und der Reset-Taster betätigt werden.
Wenn das nicht hilft, funktioniert vielleicht eine andere Tastatur.
Nun sollte der picoAC1 auf Tastenanschläge reagieren.
Stromaufnahme:
- ca. 75mA (kabelgebundene Tastatur)
- ca. 90mA (USB-Dongel drahtlose Tastatur)
Bedienung
Die Bedienung des picoAC1 erfolgt per Tastatur auf zwei Bedienebenen.
picoIO-Ebene
Einige Tastenkombinationen sind als Systemkommandos festgelegt. Diese werden auf picoIO-Ebene abgefangen und dort verarbeitet.
Hiermit lassen sich bspw. die Betriebssystemvariante, der Zeichengenerator und die Taktfrequenz auswählen.
Auch der Z80-Reset ist eines der Systemkommandos.
Die Bedienmöglichkeiten sind in diesem
Arbeitsblatt
zusammengefasst.
Bei den Auswahltasten (Strg und Shift) wird zwischen linker und rechter Taste unterschieden.
Die Auswahl und Zuordnung der Funktionen ist im picoIO vorgegeben.
Zur Änderung muss der Quelltext angepasst und eine neue Firmware gebaut werden.
Alle Tastencodes, die bis dahin nicht ausgefiltert wurden, werden zur Übersetzung in AC1-ASCII-Code weitergereicht.
Die 104 Zeichentasten einer Standardtastatur können mit verschiedenen Modifikatoren (Auswahltasten) kombiniert werden.
Hierfür stehen Shift, Strg und Alt|AltGr zur Verfügung. Modifikatoren können nur einzeln, nicht kombiniert angewandt werden.
Hieraus ergeben sich 416 mögliche Zeichen, von denen aber nur max 128 (7Bit) an die PIO des AC1 weitergereicht werden können.
Im picoIO ist zur Übersetzung eine Default-Tabelle eingebaut, die die Standardbelegung und einige Sonderfälle abdeckt.
Bereits bei den Musteraufbauten zeigte sich, dass nicht alle Monitorvarianten, Tastaturlayouts und persönlichen Vorlieben unter einen Hut zu bringen sind.
Daher kann optional eine eigene Tabelle auf der SD-Karte angelegt werden.
Die Vorgehensweise ist im Repository unter
Keyboard
beschrieben.
In einem abschließenden Filter wird das ASCII-Zeichen in Abhängigkeit vom CapsLock-Status geändert.
Bei aktiver Funktion werden die Buchstaben A-Z, zzgl. der SCCH-Umlaute in Kleinbuchstaben bzw umgekehrt gewandelt.
Der so erzeugte ASCII-Code wird mit gesetztem Bit7 an PIO-A gelegt.
Es besteht die Auswahlmöglichkeit zwischen dem üblichen Dauersignal solange die Taste gedrückt ist
und einem Einzelimpuls bei aktivierter ScrollLock-Funktion.
Letzteres ist sinnvoll bei höheren Taktraten und Autorepeat durch das Anwenderprogramm.
AC1-Ebene
Ab hier funktioniert alles, wie beim AC1 gewohnt, unterscheidet sich jedoch nach der gewählten Monitorvariante.
( Hinweis: Als Monitor bezeichneten wir damals das Betriebssystem. )
Ab 16kB EPROM lassen sich vier unterschiedliche Versionen unterbringen.
In unseren Muster-EPROM haben wir den Original-Monitor mit pico-Erweiterung, das Original mit Minibasic und zwei SCCH-Forks eingebunden.
Alternative Zusammenstellungen kann jeder nach eigenen Vorlieben bauen.
Der AC1 ist und bleibt ein Bastelrechner.
Die klassische Bedienung des AC1 bleibt erhalten und wird in der Pico-Erweiterung fortgeführt.
Auf der Kommandozeile wird ein Befehl durch einen Einzelbuchstaben/-zeichen eingeleitet.
Es können je nach Befehl bis zu drei Argumente als 1-4-stellige Hexzahlen (Großbuchstaben) und eine Zeichenkette folgen.
Eine Zusammenstellung der Bedienung des Ur-AC1 ist in diesem
Arbeitsblatt
zu finden.
Der Monitor 2 bietet zusätzlich den alten Mini-Basic-Interpreter im ROM.
Dabei muss allerdings auf die picoAC1-Bedienung verzichtet werden.
Ein
Arbeitsblatt
zum Minbasic ist im Repository hinterlegt.
Weitere Informationen zu den SCCH-Forks (Monitor 3 & 4) muss man im Netz suchen.
ac1-info ist hierfür ein guter Einstieg.
Beide Forks sind nicht an die Schnittstellen des picoAC1 angepasst.
Es wird bspw. keine SD-Karten-Unterstützung angeboten.
Programme, die speziell für SCCH-Computer entwickelt wurden, werden nur eingeschränkt bzw. nicht laufen.
Die Kommandos und Schnittstellen zum picoAC1 sind in Monitorvariante 1 im EPROM-Bereich ab 0800h untergebracht.
Hierfür musste das MBasic weichen, das sich aber über das externe Kommando "Z" in den RAM laden und dort ausführen lässt.
Die Bedienung orientiert sich am Ur-AC1. Kommandos werden durch einen Kleinbuchstaben eingeleitet,
gefolgt von Argumenten und einer Zeichenkette.
Das Ganze ist und bleibt vermutl. eine Baustelle, sodass hin und wieder der EPROMer bemüht werden muss.
Der aktuelle Stand der
Erweiterungsfunktionen
ist im Repository beschrieben.
Die erweiterten Kommandos kommunizieren mit dem picoIO über die ZCOM-Verbindung.
Daher ist es notwendig, dass in Eprom und Pico zueinander kompatible Versionen laufen.
Dies gilt im Weiteren auch für picoIO und picoVDU.
Wir sind bemüht, im Repository, die jeweils aktuellen und kompatiblen Ausgaben bereitzustellen.
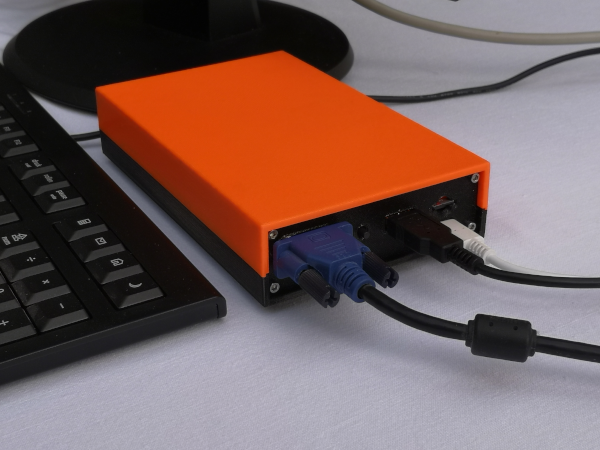
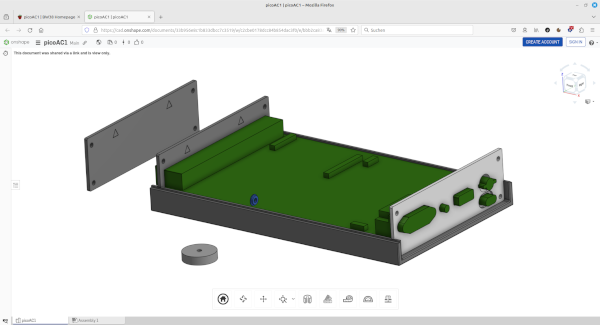
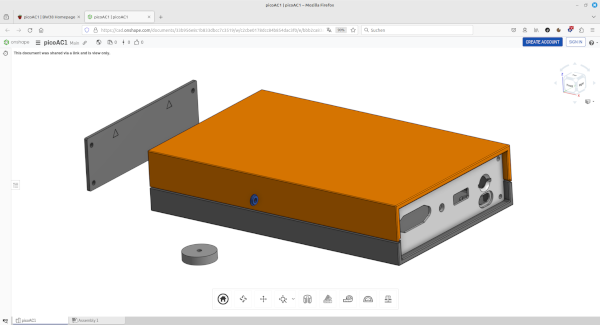
Gehäuse
Die nackte Platine bietet erhebliches Kurzschlusspotential.
Daher sollte das Ganze in ein Gehäuse gepackt werden.
Hier ist Individualität gefragt.
Ob die Hebelbank oder der 3D-Drucker bemüht wird, hängt von den persönlichen Möglichkeiten ab.
Beim Alt-AC1 mit seiner enormen Leistungsaufnahme war zumindest für den Funkamateur ein Metallgehäuse Pflicht.
Die Störstrahlung vor allem im KW-Bereich war sonst nicht in den Griff zu bekommen.
Der picoAC1 verhält sich in dieser Hinsicht deutlich moderater.
Ein Betrieb der offenen Platine während eines Fielddays zeigte keine Auffälligkeiten.
Hier war nur der VGA-Monitor heftiger Kritik ausgesetzt.
Auch die Wärmeableitung ist nun kein Thema mehr, das beim Gehäuseentwurf berücksichtigt werden muss.
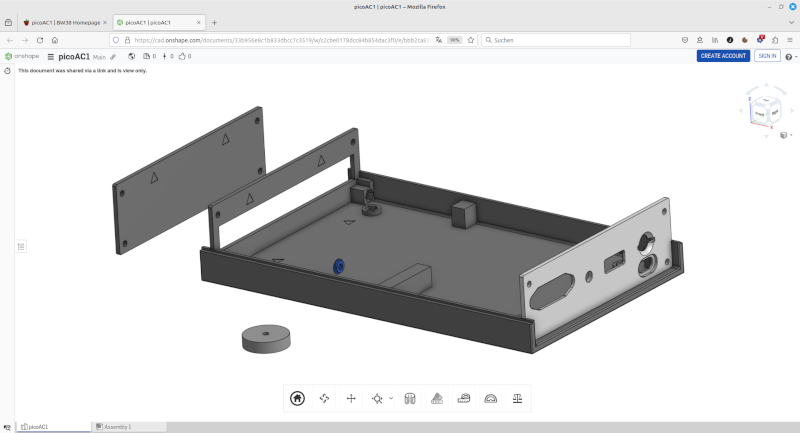
Für die Grundplatine wurde ein
3D-Modell
mit der freien Version des Onlinetools OnShape entworfen.
Die Free-Version schreibt ausdrücklich "For non-commercial use only" vor.
Eine gewinnbringende Gehäuseproduktion nach diesem Modell ist damit ausdrücklich untersagt.
Die stl-Dateien der einzelnen
Bauteile
sind im Projekt-Repository auf Codeberg.org zu finden.
Diese lassen sich slicen und ins gcode-Format des eigenen Druckers übertragen.
Wer bei OnShape angemeldet ist, kann das Projekt forken und nach eigenen Wünschen anpassen.
Gedruckt wurden unsere Muster mit einem
I3Mk3S
der Firma Prusa.
Als Material kam PETG zum Einsatz.
Die Druckzeit für alle Bauteile betrug etwa 16 Stunden je Gehäuse.
Das Ganze ist nur als Vorschlag anzusehen, nicht als Standard.


Über andere Vorschläge würden wir uns freuen.
Ein AC1 für unterwegs
Oder wie bastele ich aus Juniors Business-Notebook einen prima Klapp-AC1
 Sollte noch ein alter Laptop im Keller liegen (zu alt zum Betrieb, aber zu schade für den Schrottplatz),
lässt sich daraus vielleicht eine mobile Variante des picoAC1 bauen.
Ein Vorschlag von Jürgen (Berlin, immer noch ohne Rufzeichen) wird hier gezeigt.
Sollte noch ein alter Laptop im Keller liegen (zu alt zum Betrieb, aber zu schade für den Schrottplatz),
lässt sich daraus vielleicht eine mobile Variante des picoAC1 bauen.
Ein Vorschlag von Jürgen (Berlin, immer noch ohne Rufzeichen) wird hier gezeigt.
Verwendet wird das LCD-Panel incl. Deckel und Scharnieren eines alten Toshiba-Laptops.
Der Rest des Gehäuses ist Blechbearbeitung.
Zur Ansteuerung des Panels wird ein LCD-Controller benötigt.
Diese Boards sind im Netz für 30-50€ zu finden.
Hinweise zu Beschaffung und Anwendung werden in diesen beiden Videos
[1] /
[2]
gegeben.
Die Stromversorgung erfolgt aus vier 18650 LiIon-Akkus.
Darunter befindet sich ein 4S BMS Lademodul mit diversen Schutzeinrichtungen.
Die Betriebsspannungen von 5V und 12V werden über zwei Step-Down-Wandler bereitgestellt.
Stromfresser ist hier natürlich der Bildschirm mit ca. 10W.
Bei voll geladenen Akkus sind 3-4h Betriebszeit möglich.
Als "Zweitrechner" ist in dem Gehäuse ein
Picomite
untergebracht.
Dabei handelt es sich um einen Basic-Rechner auf Basis eines Raspberry Pico.
Das Umstecken zwischen beiden Systemen ist mit wenigen Handgriffen erledigt.
Overclocking
Das ursprüngliche Konzept des picoAC1 sah Taktfrequenzen bis zu 4MHz vor.
Der Flaschenhals war die VDU-Schnittstelle.
Durch Optimierung der Polling-Loop ließ sich der Z80-Takt auf 8MHz steigern.
Weitere Erhöhungen führten zu fehlerhaften Zeichen in der Bilddarstellung.
Die Software der Eingangsstufe des picoVDU wurde in Version 1.2.0 grundsätzlich überarbeitet.
Das Einlesen von Adressen und Daten übernimmt nun die bisher freie PIO (Programmable Input/Output) - Unit (nicht zu verwechseln mit der gleichnamigen Z80-PIO).
Das Multiplexen erfolgt flankensynchron mit dem VDUSEL-Signal.
Die Prozesszeit zum Einlesen eines Zeichens beträgt noch etwa 50ns.
Damit ist viel Luft nach oben.
Zeit zu testen, ob sich der picoAC1 beschleunigen lässt.
Ab picoIO Version 1.2.0 wurde folgende (versteckte) Tastenkombination zugewiesen:
LStrg + Alt + F12 : Z80-Clk 12MHz
Der picoAC1 muss hierfür einige Anforderungen erfüllen:
Zilog - ICs
CPU, PIO und CTC müssen die Taktrate verarbeiten können.
Das bedeutet nicht, dass der aufgedruckte Wert >= 12MHz sein muss.
Die getesteten picoAC1 sind mit max. 10MHz-ICs bestückt.
Auch 6MHz - PIO bzw. CTC laufen in einigen Mustern bei 12MHz unauffällig.
Eine Garantie, dass dies in jedem Fall funktioniert, gibt es jedoch nicht.
Speicher
Die Länge eines CPU-Taktes beträgt 83ns.
Schreiboperationen sind nach einem Takt abgeschlossen, zu lesende Daten müssen nach 1,5 Takten bereitstehen.
Hiernach richten sich die maximalen Zugriffszeiten von RAM und EPROM.
Handelsübliche RAMs mit 55ns oder 70ns sollten funktionieren.
Oft werden ältere EPROMs aus der Bastelkiste genutzt. Längere Zugriffszeiten als 120ns werden zu Problemen führen.
100ns-Typen oder schneller sind zu empfehlen.
Logik-ICs
Die Gatterlaufzeiten der 74HCT-Reihe führen zu keinen signifikanten Verzögerungen.
Der Vorteiler U8b wird mit 24MHz angesteuert. Dies liegt innerhalb der Spezifikation.
Systembus-Erweiterungen
Für Erweiterungskarten gelten die vorgenannten Punkte analog.
Erste Versuche sollten immer ohne zusätzliche Buslast durchgeführt werden.
Das VDIP-Modul aus diesem Projekt und eine RAM-Disk (2xPIO) zum direkten Anstecken laufen auch bei 12MHz ohne Auffälligkeiten.
VDIP wird üblicherweise unter CP/M mit dem Filecommander genutzt.
Dieser muss entsprechend gepatcht sein, um das VDIP-Modul bei 12MHz ansteuern zu können.
Auch die im Robotronforum vorgestellte RAM-Disk mit Rückverdrahtungsplatine wurde erfolgreich getestet.
Der Stromverbrauch steigt von 90mA (bei 2MHz, incl. Tastatur und SD) auf ca. 130mA bei 12MHz.
Der 12MHz-Betrieb ist als experimentell anzusehen.
Eine Funktionsgarantie gibt es nicht.
Wenn die Voraussetzungen passen, ist ein Test lohnenswert.
Aber Vorsicht:
Nicht zu lange auf den Cursor schauen.
Das Projektteam übernimmt keine Verantwortung für gesundheitliche Beeinträchtigungen.
Neuigkeiten
Januar 2025
Auf Codeberg steht ein neues picoCPM-VT -
Paket
bereit.
Der Focus liegt auf Borlands TurboPascal.
Die Tastaturbelegung ist an den Pascal-Editor angepasst.
Das BIOS wurde in die Release-Version 1.0 überführt. Funktionell bestehen keine Unterschiede zur Testversion 0.9a.
Zum Testen muss lediglich die zip-Datei heruntergeladen, entpackt und der enthaltene Ordner auf die SD-Karte des picoAC1 kopiert werden.
Nach wechseln in dieses Verzeichnis startet CP/M über die (Hotkey-)Taste F1.
Im äußersten Notfall lässt sich die Dokumentation zurate ziehen.
Bei der Arbeit mit dem Pascal-Editor ist aufgefallen, dass eckige und geschweifte Klammern bei aktivem CapsLock vertauscht werden.
Der Fehler wurde in picoIO-Firmware V1.3.1 behoben.
Die Beschreibung des
picoVDU
wurde aktualisiert.
Dezember 2024
Eine Toolsammlung zum komfortablen Debuggen und Einbinden von USB-Sticks im Monitor V3.1 wurde von Joachim erstellt.
Das Programm steht auf
Codeberg
zu Download bereit.
Oktober 2024
Für den picoAC1 wurde zur Kommunikation der User untereinander ein
Schwarzes Brett
eingerichtet.
Jeder der Fragen oder Antworten zum picoAC1 hat, kann das "Brett" nutzen.
Dort können auch eigene SW-Projekte oder HW-Erweiterungen der Allgemeinheit vorgestellt werden.
Auf Grund geringen Interesses wurde der Dienst im Jan 2025 wieder abgeschaltet.
Die Nutzerzahl rechtfertigt nicht den Wartungsaufwand.
Juni 2024
Die Firmwareupdates wurden vom Debug- in den Release-Status überführt.
Die ToDo-Liste mit (realisierbaren) Nutzervorschlägen ist größtenteils abgearbeitet.
Die
Dateien
und der
Quellcode
sind ins Projektverzeichnis auf Codeberg hochgeladen.
Hier eine grobe Übersicht der Änderungen, weitere Informationen sind im
ChangeLog
und der
ToDo-Liste
zu finden:
EPROM V1.1.0
zusätzliche Monitorkommandos:
"v" : Anzeige der Firmware-Versionen
"?" : Liste der Kommandozeichen
zusätzliche Funktionen im Sprungverteiler:
- FileExists: Testen, ob eine Datei im aktuellen Verzeichnis existiert
- SysClk: Setzen des Z80-Taktes durch Anwenderprogramm, ermitteln des aktuellen Taktes
Die Änderungen betreffen nur Mon1.
Mon2 - Minibasic ist entfallen, stattdessen Vorgängerversion V1.0.3
Mon3, Mon4 bleiben unverändert.
picoIO V1.2.1
- umfangreiche Anpassungen für CP/M-Modus
- Unterstützung der Monitor-Änderungen des EPROM
- Hilfetexte für Monitorkommandos "h" & "H"
- Umstellung Ein-/Ausgabe der Systemzeit auf ME(S)Z ("t"-Kommando), (intern weiter UTC)
- Scancodetabelle und Hotkey-Liste für jedes Unterverzeichnis separat definierbar
- Overclocking, experimenteller 12MHz-Z80-Betrieb,
Hinweise
beachten !
picoVDU V1.2.2
- umfangreiche Anpassungen für CP/M-Modus
- Vorbereitung CP/M 80x25 - Bildmodus
- beschleunigtes Einlesen der Bilddaten
- Unterstützung Firmware-Versions-Anzeige
Das Update der beiden Pico wird empfohlen, muss aber paarweise erfolgen.
Das EPROM-Upgrade kann erfolgen, wenn die zusätzlichen Funktionen genutzt werden sollen.
Beim Overclocking sind die Zugriffszeiten des EPROM zu beachten.
Mai 2024
Jürgen stellt seine Variante eines portablen
Klapp-AC1
vor.
April 2024
Das VDIP-Modul zum direkten Anstecken an den Systembus ist fertiggestellt und getestet.
Beschreibung, Schaltung, Gerber-Daten und Gehäusevorschlag sind auf
codeberg
zu finden.
Februar 2024
Eine erste Version des angepassten CP/M ist fertiggestellt und wurde ins
Projektverzeichnis
hochgeladen.
Ein (Zwischen-) Fazit
Die Idee zum picoAC1 entstand im Frühsommer 2023.
Der 40. Jahrestag des ersten Artikels im Funkamateur stand bevor und es stellte sich die Frage, wie wir diesen Anlass feiern wollen.
Wie auch bei manch anderen Dingen in der Menschheitsgeschichte war ein wenig Gerstensaft bei der Entscheidungsfindung hilfreich.
Nach ein paar Tagen individueller Konzeptarbeit haben wir unsere Ideen übereinandergelegt und konnten in großen Teilen Deckungsgleichheit feststellen.
Anfangs war unklar, ob sich die VGA-Ausgabe realisieren lässt.
Ein erster Versuchsaufbau zeigte aber schnell, dass die Bibliothek von V.Hunter Adams hervorragend zu unserem Konzept passt.
Das Mitlesen der Bilddaten auf dem Z80-Bus stellt derzeit noch den Flaschenhals bei der Taktfrequenz dar.
Anfangs waren 4MHz angestrebt, die durch Optimierung auf 8MHz angehoben werden konnten.
Das Ende der Fahnenstange ist aber noch nicht erreicht.
Ein SW-Umbau der Eingangsstufe des picoVDU von Pollingbetrieb auf eine PIO-Statemachine dürfte einiges an Leistungsschub bringen (erledigt).
Bei Software und Bedienung haben wir uns bemüht, so dicht am Original zu bleiben wie möglich.
Die Wiedererkennung sollte gegeben sein.
Ein CP/M und das 8k-Basic sind mittlerweile an die neue HW angepasst und stehen im Repository zum Download bereit.
Hier wurde im Besonderen die SD-Karte als Massenspeicher integriert.
Es wird weitere Versionen des Monitors und der Pico-Firmwaren geben.
Ggf wird auch einmal der Monitor V3.1 überarbeitet.
Im Repository versuchen wir AC1-Anwender-SW zusammenzutragen, die damals allgemein verfügbar war.
Bei vielen Programmen sind Herkunft und Autor unbekannt.
Sollte jemand Einwände gegen eine Veröffentlichung haben, bitte eine Info über unsere Projekt-Email-Adresse.
Bei berechtigtem Interesse werden wir die Daten löschen.
Konstruktive Kritik, vielleicht auch Zustimmung nehmen wir gern über unsere Projekt-Emailadresse entgegen.
Auch an Fehlermeldungen, wenn möglich reproduzierbar, sind wir interessiert.
Auf Hinweise, wie "Das hätte man doch auch ganz anders machen können",
hier vorab die Standardantwort: "Ja, das könnte man tun, nur zu ...".
Zum Schluss möchten wir allen danken, die uns bei dem Jubiläumsprojekt unterstützt
und nicht gleich ausgelacht haben.
Besonderer Dank für sachdienliche Hinweise und das Testen von Hard- und Software gilt Rolf(DG3RW),
Johann
(DO1JSP),
Gerd
(LE) und Jürgen(Berlin),
der auch die Zeichengeneratoren entworfen und angepasst hat, sowie
der Redaktion der Zeitschrift
Funkamateur.
Links
Projekt-EMail:

Repository:
Projektseite auf Codeberg.org
Grundplatine Schaltbild
Grundplatine Stückliste
Grundplatine Gerberdaten
EPROM-Inhalt all in one
picoIO UF2-Firmware
picoVDU UF2-Firmware
Arbeitsblatt Systemkommandos
Arbeitsblatt Monitor V3.1
Arbeitsblatt Minibasic
Bedienung Monitorerweiterung
Schnittstellenbeschreibung Monitorerweiterung
USB-Tastatur Scancodes
Gehäuse 3D-Modell
Gehäuse stl-Dateien
Kommunikation Schwarzes Brett
Extern:
Geschichte und Gegenwart ac1-info
Aufbau und Inbetriebnahme Fotogalerie
VGA Video Signal Format and Timing
Listing Mon V3.1Original-Monitor 32Zeilen
VGA-Bibliothek v. Hunter Adams
generische FatFs-Bibliothek Elm Chan
SD-Card-Anpassung Pico carlk3
Ergänzungsartikel Funkamateur 12/2023
Fundgrube rund um DDR-Heimcomputer
Programmsammlung für CP/M
nach oben